Servo Motor Nasıl Çalışır? Motor Kontrolü
Servo motor: Akım ve voltaja bağlı olarak tork ve hız üreten bir elektromekanik cihazdır. Servo motor, geribildirim ile bir servo kontrolcü tarafından yönetilerek kapalı döngüye tork ve hız sağlayarak çalışır.
Bir servo motorda, bir motor, bir geribildirim cihazı ve kontrol elektroniklerinden oluşur. Servo motor çeşitleri olan, fırçalı AC motor ve fırçasız DC motor, döner veya lineer ve herhangi bir boyutta olabilir. Bu motorlar, elektronik yapılı sürücü/programlayıcı devrelerle beraber kullanılmaktadır. Günümüzde kullanılan servo motor ve sürücüleri, dijital ve mikroişlemci kontrollü yapılıdır.
Servo Motor Çalışma Prensibi
Geribildirim Cihazı
Bir potansiyometre, Hall etkili cihazı, devir sayacı, çözücü, kodlayıcı, lineer transdüser veya sensör olabilir.

Potansiyometre
Kontrol Elektroniği
Servo sistemi tamamlamak, motora güç veren ve servo motorun komut verilir. Bunun çalıştığını doğrulamak için geribildirim verileri ile komut referansını karşılaştırır.
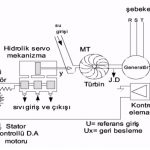
En çok kullanılan servo mekanizmalardan biri;
Motor, hız sensörü (geribildirim) ve ayarlanan hız ile dışardan gelen hızı karşılaştıran elektroniklerden oluşan hız sabitleyicisidir.
Dışardan gelen hız sensörü bu veriyi elektroniklere iletir. Ayarlanan hızı yükselmek için motor hızını yükseltir. Bu basit bir kapalı döngü sistemidir.
Basit bir servo motor, hıza çıkış voltajı sağlayan bir integral devir ölçer ile bir manyetik DC motordan oluşur. Sürücü elektronikleri, devir ölçerden gelen voltaja bağlı olarak motora gereken voltajı ve akımı verir. Bu yönetilen hız bir komut ile referans voltajı olarak sürücüde ayarlanmıştır. Sonra sürücüdeki devre sistemi, devir ölçer geri bildirim voltajını karşılaştırır. İstenen hıza ulaşılıp ulaşılmadığını kontrol eder, bu da kapalı hız döngüsüdür. Hız döngüsü komut verilen hızı ve devir ölçer geri bildirimini izler. Bu sırada sürücü, komut verilen hızı korumak için motora verilen gücü ayarlar.
Daha karmaşık bir servo motor sisteminde birden çok gelen sinyalleri, hassas hareket kontrolünü sağlamak için ayarlar. Sistem; akım, hız ve hassas geri bildirim elemanları kullanan konum döngülerinden oluşur. Her döngü sonra gelen döngünün sinyalini verir. Komut verilen parametreler ile eşleşmek ve düzeltmeler yapmak için uygun geri bildirim elemanlarını izler.
Çalışma Döngüsü
Temel döngü, akım veya tork döngüsüdür. Akım, hız veya itme sağlayan bir lineer motordaki tork ile orantılıdır.
Akım sensörü, motordan geçen akım ile ilgili geri bildirim sağlayan cihazdır. Sensör, motor akımına orantılı olarak analog veya dijital sinyali kontrol elektroniklerine gönderir. Servo motor yönetilen akımın altına düşünce döngü, saniyeden daha az bir sürede akımı yükseltir.
Hız döngüsü de, hıza orantılı voltaj ile, aynı prensiple çalışır. Hız, yönetilen hızın altına düştüğü zaman hız döngüsü akımı yükseltmek için akım döngüsüne bir komut gönderir.
Konum döngüsü bir PLC veya hareket kontrolcüsü için komutu kabul ederek hız döngüsüne sağlanan hız komutunu verir. Böylece komut verilen konuma hızlanmak, hızı korumak ve yavaşlamak için gereken akımın komutunu verir. Üç döngünün tümü servo mekanizmanın sorunsuz ve hassas kontrol edilmesi için ideal bir eşzamanla çalışır.
Geri Besleme Elemanı
Servo motorların en önemli özelliği sürücü devresinin olmasıdır. Ama tek başına sürücünün bulunması yeterli değildir. Sürücü, kendisine gelen bilgileri (verileri) servo motora iletir. Pozisyonunun uygun yerde ve hızda olup olmadığını, geri besleme elemanları ile kontrol eder. Sistemin özelliğine göre bu elemanlar seçilir.
- Mutlak pozisyon ölçümü ihtiyacı > Resolver veya Sin-Cos encoder
- Yüksek hız çalışması > Artımlı encoder
- Düşük hız çalışması > Resolver veya encoder
- Doğruluk (hassasiyet ) > Artımlı encoder
- Yüksek sıcaklıkta çalışma > Resolver
Servo Motorun Kontrolü
Bütün motorların içinden çıkan üç kablo vardır. Bu kablolardan ikisi besleme içindir. (pozitif ve negatif), diğer kablo ise mikro denetleyici (MCU)’ dan gönderilecek sinyal için kullanılır. Servo motor, kontrol kabloları tarafından sağlanan PWM (Modülasyonlu Darbe Genişliği) ile kontrol edilir.
PWM motor kontrol devresi sinyal bilgisini aktarım için uygun hale çevirir. Bu PWM sinyaller bir microcontroller veya uzaktan kumandadan da sağlanabilmektedir. Yani dönme açısının, Kontrol PIN’ ine uygulanan darbenin süresi tarafından kontrol edildiği anlamına gelir.
Hareket etmeleri için gereken pals genişliklerinin minimum ve maksimumları vardır ve bu değerler değişkendir. Genellikle minimum pals genişliği 1 ms, maksimum pals genişliği ise 2 ms’dir. Servo, her pals verildiğinde 20 ms‘ lik bir gecikmeyle çalışır. Pals uzunluğu servonun ne kadar uzun haraket edebiliceğini belirler. Mesela 1.5 ms’ lik bir pals verilirse motor 90° dönecektir (nötr pozisyon). Eğer 1.5 saniyeden daha uzun bir pals verilirse mil 180° daha yakın bir açıda dönecektir.

Servo Motor Açı Kontrolü
Normal bir servo kontrolü devresi “Oº ile 180°” lik açıların kontrolü ile sınırlıdır. Ancak 210°ye kadar değiştirebilir. Bu üründen ürüne göre çeşitli farklılıklar gösterir. Fakat 360º çalışma açısına sahip özel amaçlı servo motorlar da vardır. Normal bir servo motorun, çıkış dişlisinin mili mekanik olarak kısıtlamalıdır. Bu nedenle daha büyük bir açı ile hareket ettirilemez.
Servo Oransal Kontrol
Motora uygulanan güç hareket etme miktarıyla orantılıdır. Eğer mil büyük bir uzaklık kat ederse yol, motor tüm gücüyle çalışır. Eğer küçük bir açı için hareket edecekse, motor daha yavaş döner. Buna oransal kontrol adı verilir.
Servolar hareket etmek için bir komut aldıklarında önce istenilen pozisyona hareket eder. Daha sonra ise o pozisyonda kalırlar. Bu pozisyonu korurken kendilerine dışarıdan bir güç uygulandığında bu güce mukavemet gösterirler. Bulundukları pozisyonlarını koruyabilmeleri için pals in tekrar edilmesi gerekebilir.
Servo motorlar çalışırken mekanik aksam birbirine senkronize çalışmalıdır. Eğer mekanik aksam birbirine senkronize çalışmazsa dağılır. Servo sistem de kullanacak servo motor ve sürücüleri, servo sürücüler (servo drive) kaliteli olmalıdır.
Asenkron motor veya senkron motorların birbirine benzer bir çalışmaları vardır. 3 fazlı servo motorların hız kontrol sistemi pals frekans çevirici devresi üzerinden pals genişlik modülasyonu (PWM) devreleri ile sağlanmaktadır. Servo motor firmaları tarafından AC servo motor, küçük güçlü (1-10W), küçük boyutta iki fazla çalışacak tarzda imalatı yapılır. Servo motor fiyatları güç, hız, tork ve dişli kapasitesine göre belirlenir.
Kalkış momentlerinin ve savrulmanın az olması için servo motorların rotorları uzun, küçük çaplı yapılır. Statör sargılarına uygulanan gerilimin frekansı 50-60-400-1000 Hz olabilir. İki fazlı servo motor statorunun, eksenleri arasında 90º lik elektriksel bir açı, iki adet sargı vardır. Sargılardan biri kontrol sargısı diğeri ise referans sargısıdır.
Sincap kafesli sargı, rotoru taşır ama yüksek dirence sahiptir. Sabit değerli, sabit frekanslı referans sargısına alternatif akım uygulanır. Yükselteç devresinden gelen kontrol gerilimi kontrol sargısına verilir. Rotor iki sarımda meydana gelen manyetik alanlara bağlı olarak döner. İki geriliminde dolaştırdığı akımların oluşturdukları manyetik alanlar birbirlerini iter ve dönmeyi başlatır.
Servo Motor Haberleşme Kablosu
Servo motor özellikleri ile iletişimde; data kablosu (cat5) servo ile haberleşmek amacıyla kullanılır. Açı data kablosuna verilecek sinyalin süresi ile orantılıdır. Bu sinyal kodu modulasyon (Pulse Coded Modulation) PCM olarak isimlendirilir.
Servo Motor Kullanım Alanları
Dijital kontrollü ve hassas makinelerde en çok tercih edilen servo motorlardır. Basit sistemlerde genel olarak bir elektronik servo motor sürücü devresi yeterli olur. Model uçak gibi bir sistemde elektronik sürücü (electronic driver) motorun hızını istenen değerde ayarlar.
Karmaşık sistemlerde ise bilgisayarlardan faydalanılır, iplik fabrikası gibi. Bir sistemde, birden fazla servo motordan oluşan sistemin kontrolü bilgisayarla yapılabilir. Servolar programlanabilir bir mile sahip, küçük aygıtlardır. Belirli kodlar göndererek bu milin durumu istenilen açıda değiştirilebilir. Giriş hattındaki kodlu sinyal olduğu sürece, servo milin durumunu kodun istediği şekilde sabit tutar. Kodlar değiştikçe milin açısal pozisyonu da değişir.

Mini servo motor
Örneğin, servolar uzaktan kumandalı uçaklarda yön tayin etmek için hareketli parçaların durumlarını değiştirmek için kullanılır. Uzaktan kumandalı araçlar, oyuncaklar ve robotlar için kullanılırlar. Mini servo motor robotlar için önemli parçadır. Gömülü kontrol devrelerine sahip ve küçük boyutlarına rağmen çok güçlüdür. Ayrıca mekanik gücü orantılı harcar. Hafif yüklü bir servo fazla güç harcamaz. Servo motor bakım istemeyen bir motordur. Servo motor tamiri kolay yapılır.





Bir yanıt yazın