Step Motor Çeşitleri
Step motor çeşitleri: Elektrik enerjisini dönme hareketi ile fiziksel enerjiye çeviren elektromekanik cihazlara step motor denir. Bu motorlara aynı zamanda adım motorları adı verilir. Kullanımda olan birçok elektrik motorlarında olduğu gibi step motor, yapısı ve çalışmasına göre sınıflara ayrılır.
Yapılarına göre step motorlar beşe ayrılırlar.
- Sabit mıknatıslı step motor (PM)
- Hibrit step motor (HB)
- Değişken relüktanslı step motor (VR)
- Hidrolik step motor
- Lineer step motor
Not: Uygulamada en çok değişken relüktanslı ve sabit mıknatıslı step motorlar kullanılmaktadır.
Sabit Mıknatıslı Step Motorlar (PM)
Sabit mıknatıslı step motor, değişken relüktanslı motorlara benzerler. PM (Permanent Magnet Stepper Motors) motorların yapılarında rotorda sabit mıknatıslar bulunur. Rotorundaki sabit mıknatıs kutupları (N ve S) rotor kutuplarını oluşturmaktadır. Rotor da bulunan kutupların ve statör da bulunan sargıların az veya çok sayısı da olması, motorun adım sayısını belirler.

Sabit Mıknatıslı Step Motor Çalışma Prensibi;
Statör bobinlerine uygulanan gerilime ve bobinlerden geçen akımın yönüne bağlı olarak step motorun dönmesi gerçekleşir.

Şekildeki motorun her adımı 90° dir. Bu motorunun 1. fazına verilen enerjiyi kesip, 2. fazına enerji verildiğinde rotor 90º döner. Yani motor bir adım ilerler. 2. Fazın enerjisini kesip 3. Faza enerji verildiğinde ise rotor 90° daha döner. Statör sargılarına enerji vererek motorun sürekli dönmesi sağlanır. Adım açısını azaltmak için manyetik kutup sayısı ile birlikte statör kutup sayısı arttırılmalıdır.
Bu tip motorlardaki rotorlarda bulunan mıknatıslar, manyetik akının artmasını sağlar. Statör bobinlerindeki akım arttıkça manyetik alan, buna bağlı olarak tork da artar. Sabit motorlu step motorlar, değişken relüktanslı step motorlara göre daha yüksek torklarda çalışırlar. Buna alternatif olarak küçük adım açılarına sahip hibrid step motorları kullanılmaktadır.
Sabit mıknatıslı step motorlar kendi içlerinde dörde ayrılır;
- İki fazlı sabit mıknatıslı iki fazlı step motor
- Orta uçlu sargılara sahip sabit mıknatıslı step motor
- Disk tipi sabit mıknatıslı step motor
- Dört fazlı sabit mıknatıslı step motor
Hibrit /Hybrid) Step Motor (HB)
Step motorların da rotorlarında sabit mıknatıs bulunur. (Hybrid Stepper Motor). Bu motorlara hybrid denmesinin nedeni;
çalışma prensiplerinin sabit mıknatıslı step motorlar ve değişken relüktanslı step motorların birleşiminden oluşmasıdır. Hybrid motorlarda statörün nüve yapısı değişken relüktanslı step motorlara çok benzese de ancak sargı bağlantıları farklıdır. Bu motorlarda adım kararlılığı, hız ve tork gibi özellikleri vardır. Sabit mıknatıslı step motorlardan daha iyi performans gösterirler.
Değişken relüktanslı step motorunda bir kutupta bir fazın iki sargısından sadece biri sarılmıştır. Oysa 4 fazlı karışık yapılı step motorunda iki farklı fazın sargıları aynı kutupta sarılmıştır. Bundan dolayı bir kutup sadece bir fazın altında değildir. Karışık yapılı adım motorlarında moment, dış yapılarındaki hava aralıklarının manyetik alanlarının etkileşimi ile oluşturulur.
Bu tip motorlarda sürekli mıknatıs, sürücü kuvveti oluşturmak için önemli rol oynamaktadır. Ama karışık yapılı adım motorundaki rotor ve statör dişlerinin küçük adım açıları elde etmek için dizayn edildiği bilinmelidir. Bu motorun hem rotoru hem statörü çıkıntı şeklindeki dişlere sahiptir. Rotor, yumuşak demirden yapılmıştır.
Bu sayede statördeki sargılarda oluşan manyetik alan, kendisine en yakın rotor dişlilerini çekerek dönüşü sağlamaktadır. Hiybrid tipi adım motorların dönüş derecesi 1,8° gibi çok küçük değerlere indirilebilmektedir. Günümüzde hibrit step motor kullanım alanları, çok geniş yer bulmuştur.
Değişken Relüktanslı Step Motorlar (VR-DR)
Bu motorlar en temel ve en basit step motor tipidir. Değişken relüktanslı step motorların rotorlarında sabit mıknatıs yoktur. Sabit mıknatıslı step motorlarda olduğu gibi bu motorlarda da en az dört kutuplu stator bulunmaktadır. Sabit mıknatıslı değil, mıknatıslanabilen çok kutuplu malzemelerden yapılmış rotorlar bulunur.
Statöründe ise bobinler ve elektromıknatıslar bulunmaktadır. Statör sargıları genellikle üç faz olup yıldız bağlıdır. Statör ve rotor nüveleri genellikle ince tabakalı silisli çelikten yapılırlar. Düşük magnetomotor kuvveti uygunlansa bile statör ve rotor malzemeleri yüksek geçirgenlikli ve içlerinden yüksek manyetik akı geçecek kapasitede olmalıdır.

Bu motorlarda rotor, küçük boyda ve hafif olarak yapılır. Rotor ölçülerinin küçüklüğü eylemsizlik momentinin de küçük olması demektir. Fazlara uygulanan gerilim, oluşturacağı moment nedeniyle rotorunun hareketi hızlı olur. Değişken relüktanslı motorların harekete başlama, durma ve dönme adımları, sabit relüktanslı step motorlarından hızlıdır.
Değişken Relüktanslı Step Motor Çeşitleri
Tek parçalı değişken relüktanslı step motor; statör kutupları tek parçadan oluşan step motorlardır. Statör ve rotorları tek dişli olarak yapılan step motorlara tek parçalı VR step motor adı verilir.
Çok parçalı değişken relüktanslı step motor; rotoru 12 dişli olarak yapılmıştır. Statörü ise her kutupta 3 dişli olmak üzere 4 kutuptan ve böylece 12 dişliden meydana gelmiştir.
Hidrolik Step Motor
Bir diğer adları da elektro-hidrolik step motorlardır. Büyük güçlü hidrolik motora ait servo valfinin giriş basınç yolunu translatör ile (dönebilir lineer çeviriciyle) step motor kontrolü yapan motorlara hidrolik step motor adı verilir. Kısaca hidrolik motorun basınçlı yağ yolunu kontrol etmek suretiyle şaftın hareketini ve yönünü belirleyen step motorlara hidrolik step motor denir.
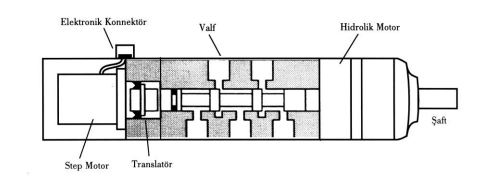
Hidrolik step motorlarını, oluşturan parçalar:
- Step motor
- Hidrolik motor
- Valf (valve)
- Translatör
- Elektronik konnektör
Lineer Step Motor
Dairesel bir mekanik hareket değil, yatay eksende çizgisel bir mekanik hareket gerçekleştiren motorlara lineer step motor denir. Motor, bulunduğu elektromanyetik alanı X ve Y eksenlerinde tamamlamak için hareket eder.
Lineer motor nedir? konumuzda detaylı olarak bulabilirsiniz.
Step (Adım) Motoru Sürme Devreleri
Sürme devrelerinin görevi motorun statör sargılarına dönüş için gerekli olan akımı vermektir. Günümüzde birden fazla step motoru sürücü devreleri bulunmaktadır. Ancak temelde hepsinin görev ve yapıları aynıdır. Aşağıdaki resimde adım motoru sürme devresi şematik olarak gösterilmiştir.
Diğer resimde ise transistorlü bir adım motor sürme devresi gösterilmiştir. Bu şekle göre gösterilen devre transistor ve dirençten meydana gelmiştir, en basit sürücü devresidir. Herhangi bir anahtar kapatılarak kendisine bağlı olan transistoru iletime sokar. Transistore bağlı bobin enerjilenir. Böylece motor bir adım atmış olur.

- Darbe üretci (osilatör) ile adım aralığı ayarlanır.
- Lojik bir sistem ile giriş sinyalleri motorun dönüş yönünü ve hızını ayarlayacak şekilde yorumlanır.
- Bir yükseltici ile de adım motoruna gerekli olan enerji sağlanır.
Bipolar Step Motor (Bipolar Stepper Motor)
Bir bobinin oluşturmuş olduğu manyetik akının yönü bobinin sarım yönüne ve bobinin içinden geçen akımın yönüne bağlıdır. Motor gibi elektromanyetik prensiple çalışan makinelerde, şiddeti ve yönü değişen manyetik alanlara ihtiyaç duyulur. Manyetik akının yönü bobinden geçen akımın yönü ile değiştirilebilir. Ancak bazı uygulamalarda akım yönünü değiştirmek yerine bobinin sargı yönü değiştirilmek istenir.
Tabii ki bu işlem sargıyı söküp ters yönde sarmayı gerektirir. Ancak birbirine göre ters sarılmış iki sargı kullanılırsa, manyetik akının yönü içinden akım geçen sargının sarım yönüne bağlı olacaktır. Bipolar iki yönlü beslenen anlamına gelir ve bipolar adım motoru, iki yönde de akım akan motor demektir. Bipolar step motora aynı zamanda mini step motor adı da verilir.

Şekilde iki fazlı bir akım motorunun tipik bir bipolar sürme devresi gösterilmiştir. T1 den T8 kadar olan transistorlerin görevi statör sargılarından pozitif ve negatif yönde akan akımların istenen düzende akmasını sağlamaktır.
A fazından pozitif yönde akımın akması için T1 ve T4 transistörleri tam iletim durumunda olmalıdır. A fazından negatif yönde akım akması için ise T3 ve T2 transistörleri tetiklenmelidir. Böylece DC güç kaynağı A fazından iki yönde de akım akmasını sağlayacak duruma getirilmiş olur. B fazından da pozitif ne negatif yönde akım akması için benzer uygulamalar yapılmaktadır.
Unipolar Step Motor (Unipolar stepper motor)
Tek yönlü beslemeye sahip olup, sargılarından sadece tek yönde akım akıtılır demektir.
Bipolar step motor ile unipolar step motorlarının birbirine göre avantajları;
Bipolar motorlar akım yönünün değişmesinden dolayı daha karmaşık sürücü devreleri ister. Unipolar motorlarda step motor sürücü (stepper motor driver), daha basittir. Aynı boyutlardaki bipolar ve ünipolar motordan ünipolar olanında aynı sargı alanına iki bobin yerleştirildiğinden tel çapı küçük seçilir.
Halbuki bipolar olana daha kalın sargı konabilir. Kalın sargı daha çok akım dolayısıyla daha çok moment demektir. En yaygın olarak iki fazlı step motorlar kullanılmaktadır. Bunun anlamı iki fazlı, bipolar motorlarda iki faz sargı, unipolar motorlarda da 4 sargı olacak demektir. Bazı motorlarda yukarıdaki şekilde sağdaki unipolar sargıda iki bobinin ortak ucu dışarıya tek kablo ile çıkarken bazı motorlarda sargılardan ayrı ayrı uçta çıkabilir.

Bu durumda bu motorun sargıları sargı yönlerine dikkat edilmek kaydıyla seri paralel bağlanarak bipolar modd da çalıştırılabilir demektir. Şekil de iki fazı sürmek için sekiz transistör kullanan İki kutuplu bir step motorun sürücü devresi, gösterilmektedir. Ayrıca bipolar sürücü devresi dört telli veya altı telli bir step motoru da çalıştırabilir.

Redüktörlü Step Motor
Yüksek devir yerine yüksek tork tercih edilen uygulamalarda, motorun miline bağlanan bir dişli seti sayesinde örneğin çıkış hızını 30’ d/dak 1’d/dak düşürecek, ama elde edilen torkun (tork: momenti) teorik olarak 30 katına çıkması sağlanabilir.
NEMA Motor Özellikleri
NEMA 17 ve NEMA 23 Step Motor Özellikleri
Step motorlar boyutlarına göre kategorize edilirler. Örneğin “boyut 11”, “boyut 17”, “boyut 23” gibi. The National Electrical Manufacturers Association ( Ulusal Elektrik Üreticileri Birliği ). Step motorlar da dahil bütün elektrikli ürünler için standartlar belirler. NEMA standartları step motorların boyutlarıyla ilgilidir. NEMA 17: 1.7 Inch kare, NEMA 23: 2.3 Inch karelik step motor oldukları anlamına gelir.
Step Motorların Uygulama Alanları
- Yazıcılar (Printers)
- CNC makinaları (CNC machines)
- Lazer kesiciler (Laser cutters)
- Lineer aktüatörler (Linear actuators)
- Hard diskler (Hard disks)
- Tutma ve yerleştirme makinaları
- 3D printer – prototipleme makinaları
Step Motorların Özellikleri (Parametreler)
-
Çözünürlük
Çözünürlük; bir devirdeki adım sayısı yada dönen motorlar için adım açısı (derece) lineer motorlar için ise adım uzunluğu (mm) olarak ifade edilir. Bu sabit değer, üretim sırasında tespit edilen bir büyüklüktür. Bir step motorunun adım büyüklüğü, çeşitli kontrol düzenleri ile değiştirilebilir. Yarım adım çalışmada adım büyüklüğü normal değerinin (çözünürlüğünün) yarısına indirilir.
-
Doğruluk
Bir step motorunun adım konumu, tasarım ve üretim sırasında bir araya getirilen birçok parçanın boyutları ile belirlenir. Bu parçaların boyutlarındaki toleranslar ve dahili sürtünmeler, adımların nominal denge konumlarında da toleranslara sebep olur. Bu durum, step motorunun doğruluğu olarak adlandırılır ve belli bir konumdaki maksimum açısal hatanın nominal tek adım değerinin yüzdesi olarak anlatılmış halidir. Klasik step motorlarında bu hata %± 1 ile %± 5 arasında değişmektedir. Sürtünme momenti veya kuvveti sebebi ile meydana gelen konum hataları bu doğruluk ile ilgisi olmayan, daha az yada çok olabilen gelişigüzel hatalardır. Her iki tip hata toplanır ve sistemin toplam hatası elde edilir.
-
Tutma Momenti
Bir adım motorunun en temel moment karakteristiğidir. Tutma momenti eğrisi,
motorun ürettiği tutma momentinin rotor konumuna bağlı olarak değişimini veren eğridir. Eğrinin merkezi motorun tek faz (single phase) uyartılmış olduğu durumda rotorun kararlı adım konumuna karşılık düşer. Bu eğri, rotor adım pozisyonundan uzaklaştırılırsa motorda indüklenecek olan ve rotoru sıfır momentli adım pozisyonuna geri getirmeye çalışan momentin (tutma momenti) yönünü ve miktarını verir . Tutma momenti eğrisi, motorun tüm rotor konumları ve statik uyarma koşullarındaki ani momentini tam olarak tanımlamak için gereklidir. Diğer moment karakteristikleri (statik ve dinamik), bu eğri baz alınarak elde edilebilir.
-
Tek Adım Tepkisi
Motor fazlarından biri uyarılmış durumdaysa motor, kararlı bir adım konumundadır.
Bu fazın uyartımı kesilip yeni bir faz uyartılırsa motor bir adım atacaktır. Rotor konumunun zamana göre bu değişimi, tek adım tepkisi olarak tanımlanır. Tek adım tepkisi; motorun adım hareketinin hızını, tepkinin aşım ve salınım miktarını, adım açısının hassaslığını veren önemli bir karakteristiktir. Adım motorlarından maksimum performans elde edebilmek için tek adım tepkisindeki aşım ve salınımların azaltılması ve yerleşme zamanının kısaltılması gerekmektedir. Bu sebeple tek adım tepkisinin iyileştirilmesi, adım motorlarının kontrolünde çok büyük öneme sahiptir.
Step Motor Fiyatları
Step motor imalatında yapıları, çeşitleri, kullanım alanları, step sürücü devre yapımı ve PLC devresi göz önünde bulundurulur. Bu motorlar bir mekanik sistemde doğrudan sabitlenemez. Bunun için step motor tutucu denilen aparatlar kullanılmaktadır. Adım motorların fiyatlarını etkileyen faktörler arasında tutma torku, nema değeri, akım ve flanş ölçüsü gibi özellikler yer almaktadır.
Step motor akım değerleri 0.17 Nm ile 40 Nm arasında değişmektedir. Nema değerlerine göre ise step motor nema 14, step motor nema 17, step motor nema 23, step motor nema 24, step motor nema 34, step motor nema 42 step motor nema 52 olarak Nm değerleri, flanş ölçüsüne göre nema değerleri de değişiklik göstermektedir. Bütün bu detaylar step motor fiyatlarını belirleyen faktörler arasında yer almaktadır. Step motor fiyatları, kullanım alanları ve özelliklerine göre değişmektedir. Fiyat aralığı oldukça geniştir.





Bir yanıt yazın