Asenkron Motorlara Yol Verme Yöntemleri
Sanayide elektriğin %70’i, yani net tüketimin %35’i 3 fazlı (trifaze) elektrik motorlarında kullanılmaktadır. Dolayısı ile asenkron motorlarla sanayide ve her alanda sık karşılaşmaktayız. Niçin asenkron motorlara yol verme yöntemleri uygulanır?
Asenkron Motorlara Yol Verme Yöntemleri: Bu motorların kalkış-yol alma akımlarını azaltmak için uygulanan yöntemler.
1- Direk yol verme ( Doğrudan Yol Vermek)
2- Düşük gerilimle yol vermek
- Yıldız-üçgen yol verme
- Oto trafosu ile yol verme
- Dirençle yol verme
- Rotorlu sargılı asenkron motorlara yol verme
- Avare tertibatı ile yol vermek
3- Mikro işlemcilerle yol verme
- Yumuşak yol verme (Softstarter ile Yol verme)
- Frekans değiştirici (Sürücü) ile yol verme
1. Doğrudan Yol Verme (Direk Yol Verme)
Asenkron motorlar, ilk kalkış anında şebekeden 3-6 katı kadar fazla akım çeker. Kalkış sırasında çekilen bu fazla akımın süresi kısadır. Küçük güçlü motorlarda, kısa süreli fazla akımın, şebeke üzerinde olumsuz etkisi olmaz. Ancak büyük güçlü motorlarda, kalkış akımının etkisi önemlidir. Aynı zamanda büyük güçlü motorlarda direk yol vermeye kalkılırsa şebekede istenmeyen gerilim düşümleri meydana gelir. Bundan dolayı asenkron motorlarda yol verme yöntemlerinden biri uygulanır.
Doğrudan yol verme yöntemi asenkron motorun, paket, kollu şalter veya kontaktör ile doğrudan şebekeye bağlandığı bağlantıdır. Bu yöntem de küçük güçlü motorlarda tercih edilir. 1 fazlı motor, küçük güçlü motor olduğu için bu motorlara ve yine 3 – 4 kW2 ye kadar küçük güçlü üç fazlı asenkron motorlara doğrudan yol verilir.

2. Düşük Gerilimle Yol Verme
3 fazlı asenkron motorlara uygulanan yol verme düşük gerilimle yol vermedir. Düşük gerilimli yol verme ilk çalışmaya başlama, boşta çalışan motorlarda uygulanır. Yük altındaki kalkınan motora uygulanmaz. Çünkü motora düşük gerilim verildiğinde döndürme momenti de azalır. Yükü karşılamak için motor şebekeden fazla akım çeker ve kalkınmaz. Oysa düşük gerilimle yol vermenin amacı kalkış akımını azaltmaktır. Düşük gerilimli yol verme yöntemleri şunlardır;
- Yıldız-üçgen yol verme
- Oto trafosu ile yol verme
- Direnç ile yol verme
Yıldız-Üçgen Yol Verme
Bu yöntemde amaç, motoru kalkış süresince yıldız bağlı çalıştırmaktır. Aynı zamanda kalkışını tamamlayan motoru hemen normal bağlantısı olan üçgen bağlı olarak çalıştırmaktır. Motor, kalkış sırasında yıldız bağlı çalıştırıldığı için motor sargılarına uygulanan gerilim U3 değerine düşer. Motorun şebekeden çektiği akım ise 1/3 değerine düşer. Bu konuyu detaylı olarak yıldız-üçgen yol verme sayfamızda bulabilirsiniz.
Oto Trafosu İle Yol Verme
Üçgen çalışma gerilimi, şebeke gerilimine eşit olmayan asenkron motorlara yıldız-üçgen bağlantı yöntemiyle yol verilemez. Bu tip asenkron motorlara, oto trafosu veya kademeli direnç yöntemi ile yol verilir. Üçgen çalışma gerilimi şebeke gerilimine eşit olmayan asenkron motorlara bu yöntem ile yol verilir. Bu konuyu detaylı olarak oto trafosu ile yol verme sayfamızda bulabilirsiniz.
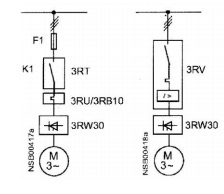
Direnç İle Yol Verme
Direnç ile yol vermede amaç şebeke gerilimini düşürmektir. Burada söz konusu olan direncin görevidir. Böylece motor, şebekeden gereğinden düşük kalkınma akımı çekmiş olur. Kalkınma akımını azaltmak için büyük güçlü motor devresine seri olarak ayarlı direnç yerleştirilir.

Kademeli olarak ayarlanan direnç sırayla kontaktör kontakları tarafından devreden çıkarılır. Bu uygulama da tek kademe direnç kullanıldığında kalkınma akımı %50 civarındadır. Oysa çok kademeli direnç kullanıldığı zaman ise kademe sayısına göre daha da fazla düşer..
Rotoru Sargılı Asenkron Motorlara Yol Verme
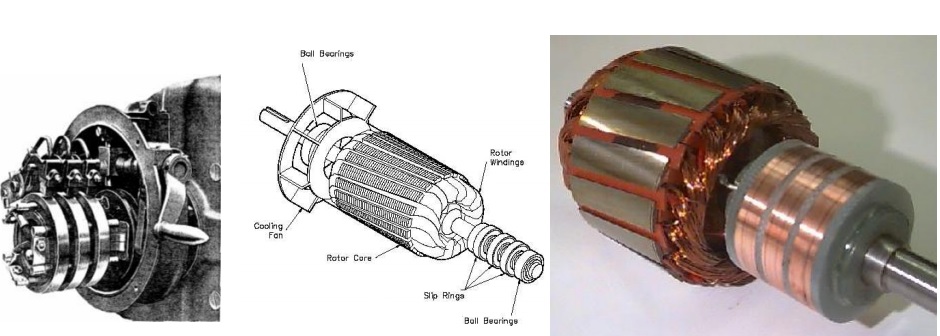
Bu motorlara bilezikli asenkron motor da denir. Rotoru sargılı asenkron motorlar da sincap kafesli asenkron motorlardaki gibi kalkınma sırasında aşırı akım çeker. Asenkron motorlarda rotor sargı direnci, yol verme sırasında devresine direnç eklenerek arttırılır. Böylece kalkınma sırasında motordan maksimum döndürme momenti sağlanır.
Rotoru sargılı asenkron motorların yol alması sincap kafesli asenkron motorlardan iyidir. Yol verme sırasında rotor sargılarına direnç eklediğimizde motor, maksimum moment ve normal kalkınma akımıyla yol alır.
Direnç eklenmemiş bir asenkron motor maksimum döndürme momentine senkron devrin %80’inde ulaşır. Eğer rotor sargı direnci %20 artırılırsa motorun ilk hareketinde maksimum döndürme momenti sağlanır. Bu sebeple rotor devresine yol verme sırasında bir yada birkaç kademe direnç eklenerek yol alma akımı azaltılır.
Aynı zaman da maksimum kalkınma momenti elde edilir. İlk anda rotor devresine, motorun gücüne uygun dirençler bağlanır. Motor yol aldıkça dirençler kademe kademe devreden çıkartılır. Bundan sonra rotor sargı uçları kısa devre edilir. Ayrıca eklenen dirençle farklı yüklerde motor devir sayısı ayarlanır.
Avare Tertibatı İle Yol Vermek
Bu yöntem yükle kalkınan motora uygulanır. Motora önce boş olarak yol verilir. Motor normal devrini aldıktan sonra, kayış yavaş yavaş kaydırılarak motor yüke bindirilir. Bu yöntem artık kullanılmamakla birlikte bilgi amaçlıdır.
3 – Mikro İşlemciler ile Asenkron Motora Yol Verme
Kurulması maliyet gerektirmesine rağmen motorlar vuruntu olmadan yumuşak kalkış yaparlar. Motor devri geniş sınırlar içinde ayarlanabilir olması bu yöntemin tercih edilmesine sebeptir. Yapısı ve çalışma prensibi mikro işlemci temeline dayanan bu elemanlar şebeke ile motor arasına yerleştirilir. Bu mikro işlemci ile motorun nasıl çalışacağı mikro işlemciye girilir. Motor istenen durumda çalışır.
Mikro işlemcilerle motorlara yol verme:
- Yumuşak Yol Vericiler,
- Sürücü İle Yol Verme.
olmak üzere 2 çeşittir.
-
Yumuşak Yol Verici (Softstarter İle Yol Verme)
Yumuşak yol alması gereken motorlara, softstarter yol vericiler ile yol verilir. Softstarter yol vericiler ile, motor akımı ve motora uygulanan gerilim takip edilir. Bu takip sonucu ayar verilir.
Yumuşak yol vericiler mikro işlemci tabanlı kontrol sistemler ile donatılmıştır. Yumuşak yol vericiler motordaki tork akım ilişkisini zamana bağlı yavaş yavaş ayarlar . Motorun devreye girmesi ve çıkması da darbe yapmadan yumuşak olur. Softstarter, motor akımı ve geriliminin kontrolünü yapar.
Motorun devreye girmesi anında şebeke gerilim değerini %30 dan %100’e kadar kontrollü bir şekilde uygular. Aynı zamanda motorun devreden çıkması sırasında da %100 değerinden % 30 değerine kadar kontrolünü yaparak devreden ayırır. Softstarterler yürüyen merdivenler, asansörler, taşıyıcı bantlar vs. kullanılır ve motor ile şebeke arasına direkt bağlanırlar.
Motora uygulanan gerilim istenilen değere göre;
- Düzgün duruma getirmek,
- Motorda frenleme yapılması,
- Kalkış ve duruş zamanının ayarlamaları yapılabilmektedir.
Yumuşak yol verici dolaylı yol vermeye de uygundur. Softstarter cihazlar, motor güçlerine göre kullanılırlar. Softstarter cihazını kullanarak yol vermede, ek bir enerji kontaktörüne ihtiyaç yoktur. Direkt bağlantılı ve V3 bağlantılı yumuşak yol verme tipleri mevcuttur. Dolaylı yol vermede, kalkış süresi 0-20 saniye arasındadır. Kalkış gerilimi, motor anma geriliminin %40 ile % 100’ü arasında ayarlanabilir.
- Araba yıkama tesislerinde,
- Yürüyen merdivenlerde,
- Zemin temizleme makinelerinde,
- Asansörlerde ,
- Küçük taşıyıcı bantlarda kullanılmaktadır.
Bu sonuca göre; Moment darbeleri önlenir. Motor kalkış akımının düşürülmesi ile motor besleme kablosuna ve yüke binen zorlamalar azaltılır. Bundan dolayı motor bakımı periyotları ve bakım maliyetleri az olur.
-
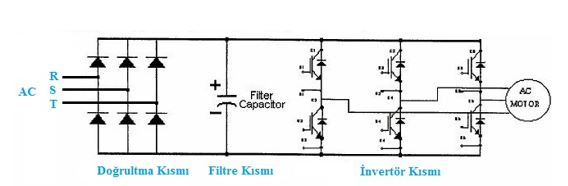
Frekans Değiştirici (İnvertör İle Yol Verme)
Frekans değiştirerek hız ayarı inverter cihazı ile yapılmaktadır. İnverter DC-AC dönüştürür. Ayrıca frekansı ve gerilimi birbirinden bağımsız ayarlayabilen cihazlardır.
Asenkron motorların kutup sayısı ve frekansı değiştiğinde hızı da değişir (n=60.f/p’dir). Sürücüde bulunan mikro işlemci ile asenkron motor statoruna uygulanan gerilim frekans oranı değiştirilir. Bu da motorun çalışma koşullarına bağlı olarak değişir. İstenilen devirde istenilen moment sağlanmış olur.
Rotoru kafesli asenkron motorlarda hız ayarı uygulanan gerilimin frekansı değiştirilebilir. Bu amaçla frekans çeviriciler (Hız kontrol cihazları) geliştirilmiştir. 3 fazlı asenkron motorlarda hız kontrol cihazları kullanılır. Tek fazlı kondansatörlü asenkron motorlarda, frekans değiştirerek hız ayarı yapılamaz. Frekans değişimi, kondansatör devresinin reaktansını değiştireceğinden yardımcı sargı devresinin özelliği değişir. Buna göre motor sargılarına uygulanan AC gerilimin frekansı değiştirildiğinde motorun devir sayısı da değişir. Frekans artınca motorun hızı da artar.
Hız Değişimi
Bir elektrik motorunun belli hızda dönmesi için, motora mikro işlemcili elektronik bir hız değiştirici, inverter takılmalıdır. Değişen hızlar için doğru akım motoru seçimi yapılmalıdır. Bu motorlarda sabit uyarı altında dönme hızı rotor üzerine uygulanan gerilim ile doğru orantılı olarak değişir.
Kuvvet çiftiyle rotordan geçen akımın şiddeti arasındaki oran aynı kalır. Bu durumda motora bir redresör (doğrultucu) takılmalıdır. Asenkron motorun hız değiştiricisi karmaşıktır. Hız değiştirici olarak statik frekans dönüştürücü inverter devreleri kullanılır. Dönüştürme işlemi iki şekilde yapılır.
Birincisi sabit bir doğru akım elde etmektir. Dolaylı dönüştürücü diyotlu bir redresör ile düzenleyici bir filtreden meydana gelir bu bileşim bir doğru akım kaynağı görevini yapar. Diğer bir yarı iletken, dalga üretecinden meydana gelen doğru akım-alternatif akım dönüştürücüsü gelmektedir.
Bu işlem için çoğu kez sinüzoidal akım oluşturma üstünlüğü olan darbe genişliği modülasyonu (PWM) uygulanır. Böyle bir durumda sayısal işlemler için mikroişlemciler kullanılmalıdır. Vektörel denetim, işlemler dizisinin kusursuz olması için metot geliştirilmiştir. Bu yöntemde de, bir başka modülleme tekniği ile asenkron motorun denetimi kolaylaştırılmıştır.




çok acık ve net bi site
Paylaşım için teşekkürler….
ellerinize sağlık teşekkürler..
teşekkürler.
tşk
Teşekkür ederim Elinize Sağlık ..
Slm benim sorum iki ayri motoru 5 saniye arayla yildiz ucgen baglsmak istiyorum. Anlaya bilcem bi sekilde sema gonderirmisiniz e posta adresime teskrler simdiden..
Şekil olarak çizmek çok sıkıntılı iş. Şöyle anlatabilirim;1. Motor üçgen olarak devreye girdiği anda 1. motorun üçgen bobinine parelel olarak 5sn. gecikmeli bir zaman rölesi daha bağlanır. Yani otomatik start butonu gibi düşün. İki ayrı yıldız üçgen motor. 2. si otomatik olarak çalışmış olacak. Start butonunun yerine 5 sn. gecikmeli zaman rölesinin normalde açık kontağı kullanılacak. Kusura bakma şunu unuttum. Buradaki zaman rölesi çit zamanlı olacak. Röleye enerji verildiğinde 5sn sonra normalde açık kontağı devreye girecek, 1sn. sonra kontak eski konuma geçecek.
Merhaba ben şuan bi fabrikada staj yapıyorum buradaki elektrik mühendisi bana tek fazlı motorun ileri geri yol verme devresinin acık ve kapalı şemasını çizip çalışma prensibini yazmamı istedi ama yardımcı sargılara kondansatör koymamı ve acıklamayı ona gore yapmamı istedi sizden bunu nasıl yapacam hakkında yardım istiyorum
Sizin için siteye şema koydum. “Bir Fazlı Asenkron Motor” yazımızda mevcuttur. Tekrar siteye girip şemayı çizebilirsin. İyi çalışmalar.
Yıldız üçgen yol verme devresinde sigorta sürekli atıyorsa ne gibi sorunlar olabilir?
Kuvvet devresi bağlantıları ve kontrol devresi bağlantılarında mutlaka bağlantı hatası vardır. Tekrar dikkatle gözden geçiriniz.
Hocam 63 kw asenkron 170 Alper 4 kademeli bir motoru dirençle yol vermek için direnç değerlerlerini nasıl hesaplarız.
Motorun gücüne uygun dirençler bağlanır.
S.a yıldız üçgen yol verme ve soft start ile yol vermenin karşılaştırmasını yazarmisiniz ?
Yıldız-üçgen yol verme başlıklı yazımızı inceleyiniz. Soft start ile arasındaki farkı görebilirsiniz.
Merhaba 40 bg dalgıç motoru jeneratör sistemle çalıştırmak istiyoruz fakat ilk kalkışta demeraj akım nedeniyle en az 90.100 kva alternator gerekiyor bu sorunu softstarter sistemiyle ne kadara düşürebiliriz yani softstarter sistemi ile 40 bg dalgıç motor için kaç kva alternator gerekir teşekkürler
Softstarter motor akımı ve geriliminin kontrolünü yaparak motorun devreye girmesi anında şebeke gerilimini %30 değerinden itibaren %100’e kadar kontrollü bir şekilde motora uygular. Aynı zamanda motorun devreden çıkması sırasında da %100 değerinden % 30 değerine kadar kontrolünü yaparak devreden ayırır. Motor akımı kaç ise bunun % 30 değerini ilk kalkış anında alacaksınız. Bu gerilim içinde geçerlidir.
Altarnatörler kayıplar nedeni ile % 100 verim ile çalışmazlar. Bu sistem için 80 ,90 kw lık jeneratör gerekir.