Step Motor Nedir? Nasıl Çalışır?
Step motor nedir: Elektrik enerjisini dönme hareketi ile fiziksel enerjiye çevirir. Bu elektromekanik cihaza step motor denir. Bu motorlar adım adım hareket ettiği için bunlara adım motorları da denir.
Yine girişlerine uygulanan pals sinyallerine karşı analog dönme hareketi çıkışı üretir. Bu dönme hareketini adım adım ve çok hassas kontrolle sağlayan sabit mıknatıs kutuplu motorlardır.
Elektrik motorlarının çalışma prensibi, statör alanının rotor alanını etkileme prensibine göre çalışmaları sürekli olmaktadır. Devir sayıları ise uygulanan gerilimine (voltaj), frekansına veya motorun kutup sayısına bağlı olarak değişmektedir.

Step Motor Hızı
Step motorlarda ise rotor hareketleri ve hızı dijital sinyallere göre değişir. Motorun bir adımda ne kadar yol alacağı ise yapısına bağlıdır. Adımlar 90°, 45°,18°, 7.5°, 1.8° yada daha küçük açı aralıklarında olabilirler. Motora uygulanacak sinyallerin frekansı değiştirilerek motorun hızı kontrol edilebilir. Ayrıca uygulanan sinyallerin sırası değiştirilerek, motorun dönüş yönü saat ibresi yönünde (CW) olabilir. Yada saat ibresinin tersi yönünde (CCW) olabilir.
Step motorların hangi yöne doğru döneceği, devir sayısı, dönüş hızı gibi değerler mikroişlemci veya bilgisayar yardımıyla kontrol edilir. Step motorları çok hassas konum kontrolü istenen yerlerde mikro step motorlar da çok kullanılır.
Motorun bir adımda ne kadar yol alacağı ise yapısına bağlıdır. Motorun yapısına bağlı olarak adımlar 90°, 45°,18°, 7.5°, 1.8° yada daha küçük açı aralıklarında olabilirler. Motora uygulanacak sinyallerin frekansı değiştirilerek motorun hızı kontrol edilebilir. Ayrıca uygulanan sinyallerin sırası değiştirilerek, motorun dönüş yönü saat ibresi yönünde (CW) olabilir. Yada saat ibresinin tersi yönünde (CCW) olabilir.
Step motorlarının hangi tarafa doğru döneceği, devir sayısı, dönüş hızı gibi değerler mikroişlemci veya bilgisayar yardımıyla kontrol edilir. Bu özelliklerinden dolayı step motorları çok hassas konum kontrolü istenen yerlerde mikro step motorlar da çok kullanılır.
Step Motor Adım Açısı
Elektrik enerjisi alındığında rotor ve buna bağlı şaft, sabit açısal birimlerde dönmeye başlar. Step motor, çok yüksek hızlı anahtarlama özelliğine sahip bir sürücüye bağlıdır. Step motor sürücü, bir encoder veya PLC’ den giriş palsları alır.
Alınan her giriş palsında, motor bir adım ilerler. Örneğin; 600 adımlık bir step motor bir tur döndüğünde 600 adım yapar. Bu halde bir adımın açısı 360 / 600 = 0,6 ° olur. Çıkan bu değer step motorun hassaslığını gösterir. Bir devirdeki adım sayısı yükseldikçe, step motor hassaslığı ve maliyeti de artar.
Step motor, yarım adım modun da çalıştıklarında hassaslıkları daha da artar. Örneğin; 600 adım / tur değerindeki bir step motor, yarım adım modun da çalışırken her turda 1200 adım yapar. Bu da 0.6º ye göre daha hassas olan 0.3º bir adım açısı anlamındadır. Bazı step motorlarda mikro step tekniğiyle adım açıları azaltılabilir. Ancak tork kayıpları sebebi ile bu kullanım biçimi etiketleme makinaları için uygun değildir. Step motorun adım açısıyla beraber step motordan tahrik alan çekme silindirinin çapı, etiketleme hassasiyetini belirler. Yüksek hızlarda hassas bir etiketleme yapmak için bu değerlerin en uygun kombinasyonu gerekir.
Step motorlarının birçok alanda kullanılmasının sebebi, bu motorların bazı artılarının olmasındandır.
Step Motor Yapısı
- Statör: Step motorun hareketsiz olan ve sargılardan meydana gelen kısmıdır.
- Rotor: Motorun hareketli, N ve S kutbundan meydana gelen ve tek parça sabit mıknatıs olan kısmıdır.
- Dış Zarf (Gövde): Motorun soğumasına da katkıda bulunan bu yapı, motoru dış etkilerden koruyan bir yapıdır.
- Rulman: Adım motorlara verilmesi gereken hareketin mümkün olan en az sürtünmeyle yani güçten en az ödün verilerek iletimini sağlamak için olan kısmıdır.
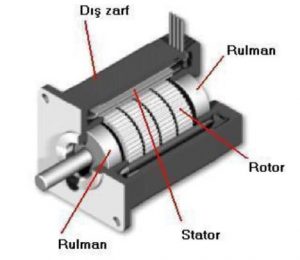
Step motor; statör (endüktör), rotor (endüvi), rotora bağlı şaft motorun dönmesini kolaylaştıran rulmandan meydana gelmiştir. Step motorun yapısında statörünün birden fazla kutbu (genel olarak sekiz kutup) vardır. Bunların polaritesi elektronik anahtarlarla değiştirilir. Anahtarlama neticesinde statörün güney ve kuzey kutupları döndürülür. Rotorun güney kutbu “N”, statörün kuzey kutbu “S” sıralıdır.
Rotorun mıknatıslığı, bir sürekli mıknatıs yada dış uyarım yöntemi ile meydana getirilebilir. Bu arada sürekli mıknatıs meydana gelecektir. Adımları (stepler) vasıtasıyla ortalama statör alanı döner ve rotorda buna benzer adımlar arasında izler. Daha iyi bir seçicilik sağlamak için rotor ve statör üzerine küçük dişler yapılmaktadır. Yapılan bu dişler birbirlerine temas etmemelidir.

oluşan motorlar).
Step Motorların Avantajları;
- Geri beslemeye (feedback) gereksinim duymazlar. Step motorların rotasyon (döngü) açısı giriş palsi ile orantılıdır. Açık döngülü olarak kontrol edilirler.
- Step motorun hareketlerinde konum hatası yoktur. Hassas kontrol gerektiren projeler için kullanılır.
- Sayısal olarak kontrol edilebildikleri için bilgisayar veya mikroişlemci gibi elemanlarla kontrol edilirler.
- Step motorlar durmak, yön değiştirmek ve harekete başlamak için gönderilen sinyallere çabuk cevap verirler.
- Step motorların mekanik yapısı basit olduğu için bakım gerektirmezler.
- Herhangi bir hasara yol açmadan defalarca çalıştırılırlar.
Step Motorların Dezavantajları;
- Step motorlar adım açıları sabit olduğu için hareketleri sürekli değil darbelidir. Titreşim bazı hız değerlerinde moment kayıplarına sebep olabilir.
- Step motorlar sürtünme kaynaklı yükler, açık döngülü kontrolde konum hatası oluştururlar. Çok yüksek hızlarda kolaylıkla kontrol edilemezler.
- Step motorların elde edilebilecek güç ve momenti sınırlıdır.
- Servo motor ve DC motorlara göre daha karmaşık sürücü devrelere gereksinim duyabilirler.
Step Motor Nasıl Çalışır?
Step motorun, anahtarla sargılarına enerji uygulandığında, enerji uygulanan sargının karşısına geldiğinde durur. Giriş pals uygulandığında, belli bir miktar döner ve durur. Bu dönme miktarı, motorun yapısına göre belli bir açı ile sınırlandırılmıştır.
Step motorda rotorun dönmesi, girişe uygulanan pals sayısına bağlı olarak değişir. Girişe tek bir pals verildiği zaman rotor, tek bir adım hareket eder ve durur. Daha fazla pals uygulanınca pals sayısı kadar adım hareket eder. Bu step motorların özelliğindendir. Tüm step motor çalışma prensibi bu şekildedir.
Step motor, bir daire içinde elektromanyetik alanların dönüşü ile açıklanabilir. Step motor bağlantı şeması yukarıdaki şekildeki gibidir. Şekilde görüldüğü gibi 1 nolu anahtar kapatıldığında sabit mıknatıs kendiliğinden 1. elektromanyetik alanla aynı çizgiye gelecektir.
Daha sonra 1 nolu anahtarı açılıp, 2 nolu anahtarı kapatılırsa sabit mıknatıs 2. elektromanyetik alanın karşısına gelecektir. Bu olaylar sırasıyla tekrarlanırsa, sabit mıknatıs yani rotor bir daire içinde düzgün şekilde döner.

Step motorun prensip şeması
Step Motorun Adım Açısının Hesaplanması
360º dönen step motorlarda gerekli adım açısının (Qs) bulunması faz sayısını (Ns) ve motor rotorunun çıkıntılı kutup sayısına (Nr) bağlıdır.
Step motorun adım açısı şu formül ile hesaplanır.
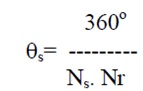
Formülde;
Qs= Step motorun adım açısını
Ns= Step motor faz sayısını
Nr= Rotorun çıkıntılı kutup sayısını ifade etmektedir.
Step Motor Adım Sayısı
Step motorların bir devri için gerekli adım sayısının bulunmasında şu formül kullanılır. Adım sayısının (S) hesaplanması için bir adımın açısını (Qs) bulmak yeterlidir.

Formülde;
S= Motorun bir devir (360º) için gerekli adım sayısını
Qs= Step motorun adım açısını tanımlar.
Step Motor Özellikleri
- Rotorun açısal hızı yeterince küçük olduğundan hareket sırasında adım kaybı olmaz. Yani kesin açısal mesafe tanımlanırsa motorun dönmesi uygun sayıda adımla kontrol edilebilir. Böylece mekanik sistemde milin hareketi yeterli ölçüdedir.
- Step motorları yüke yeterli momenti sağlayabilir.
- Step motorları DC ile uyarmada geniş bir tutma momentine sahiptirler. Yani step motorların rotor hareketi sabitken otomatik kilitleme özelliği vardır. Bu durumda rotor, sadece uç gerilimi zamanla değiştiği sürece hareket eder.
- Step motorlar sayısal kontrol sistemlerine uygundur.
- Step motor kontrolleri tekrarlanabilir.
- Hata, sadece adım hatasıdır. Genellikle adım başına % 1 ila % 5 arasında değişmektedir. Rotor pozisyonlarında mükemmel doğruluğa sahiplerdir.
- Step motoru açık-çevirim kontrollü olması nedeniyle, takometre ve/veya çözücünün (encoder) kullanılması gereksizdir. Buna bağlı olarak tasarımın maliyeti düşer. Geri besleme (feedback) ile mil pozisyonunun tayin edilmesine gerek kalmaz.
- Motor yapısının basit olması, bakımının kolay ve kullanım süresinin uzun olmasını sağlar. Bu nedenle maliyet düşmüş olur.
- Step motorlarının ısınma gibi olumsuzluklardan gelen zararları azdır.
- Motor, bir güç kaynağı ve motor cevabını değerlendiren step motor sürücü devresi ile kontrol edilebilir.
- Hız, programlama yoluyla ayarlanabilir; çalışma sırasında hız sabit kalır, değişmez.
Adım Motorlarının Uyartımı
- Tek-Faz Uyartımı (Başla-Dur Adımlama Oranı)
Motor sargılarının sadece birinin uyartıldığı uyartım cinsine tek-faz (single-phase) uyartımı adı verilir. Bu uyartım yönteminde de rotor, her bir uyartım sinyali için tam adımlık bir hareket yapar. Uyartım, dönüş yönüne bağlı olarak sırayla yapılır. Burada fazların uyartım sırası saat ibresi yönündeki (CW) dönüş için F1, F2, F3, F4; saat ibresinin tersi yönü (CCW) için F4, F3, F2, F1 şeklindedir.
- İki-Faz Uyartımı (Düzgün Hız)
Motor sargılarının ikisinin sırayla aynı anda uyartıldığı uyartım şekline iki-faz uyartımı denir. İki faz uyartımlı da rotorun geçici durum tepkisi tek-faz uyartımına göre daha hızlıdır. Ama burada güç kaynağından çekilen güç iki katına çıkar.
- Karma Uyartım (Rampalama)
Karma uyartım modun da tek-faz ile iki-faz uyartımı arka arkaya uygulanır. Burada rotor, her bir uyartım sinyali için yarım adımlık bir hareket yapar. Bu uyartım modu sayesinde örneğin çıkışı 2º olan bir motorun adım açısını 1º düşürmüş oluruz.
Step Motor Uçları
Step motorlar, 4, 5, 6 veya 8 uçlu yapılabilmektedir. Genellikle 5 veya 6 kablo (unipolar) olarak imal edilirler. 5 kablolu step motorlarda bir, 6 kablolu step motorlarda ise iki kablo ortak uçtur. Bu uçlar kaynağın pozitif (+) kutbuna bağlanır. Pozitif kutbuna bağlanacak ortak uçları ölçü aletinin ohm (Ω) kademesini kullanarak bulunabilir. Ohm kademesinde step motorun bobin uçlarına bağlı kablolar arasındaki direnç ölçülür.
Step motor 5 veya 6 kablolu olsun tüm uçlar arası eşit dirence sahip olan ortak uçtur. 6 kabloluda kablolar üçer üçer olarak iki iki grup halindedir. Her gruptaki bir kablo ortak uçtur. Ölçmede her grup kendi arasında ölçülerek ortak uç bulunur. Direnç değerleri her step için farklı olabilir. Step motorlara ait bobin kabloları farklı renktedir. Bu renkler 6 kabloluda her grup için tekrar edilir. Step motorlara ait bobin kabloları farklı renklerle belirtilirler.
Bir devre üzerinde step motoru düzgün çalıştırmak için kablolar doğru sıralamada bağlanmalıdır. Ortak uç dışında kullanılan diğer dört ucun kendi arasında bir sırası vardır. Kablo sıralaması bobin uçlarına enerji verilerek deneme yanılma şeklinde belirlenebilir.
Kablo bağlantısı hatalı ise motor titreme meydana getirerek dönmez. Motora adım attırmak için ortak uca motorun cinsine göre (+) 5V ile 12V arası sabit gerilim (pals ) uygulanır. Diğer dört uca ise belirli sırada şase (-) uygulanır. Eğer şase potansiyeli bobin uçlarına uygun sıralamada uygulanırsa motor döner.
Step motoru saat yönünde döndürmek için ortak ucu (+) bağlamalıdır. 1, 2, 3 ve 4 numaralı kabloların bağlı olduğu bobinlere sırasıyla eksi (-) gerilim verilmelidir. Step motoru saat yönünün tersine hareket ettirmek için bobinlere 4, 3, 2 ve 1 sıralamasında enerji verilmelidir.
Step ve Servo Motor Farkı
Hız arttıkça step motorlarda tork düşer. Servo motorlarda böyle bir durum yoktur. Bundan dolayı yüksek hız ve tork gerektiren uygulamalarda servo motorlar daha avantajlıdır. Ama yüksek ataletin (eylemsizlik) olduğu durumlarda step motorlar daha avantajlıdır. Durması servo motorlara göre daha güvenlidir.
- Step motorlar daha kararlıdır. Servo motorlar sabit duracağı durumlarda fren mekanizmasına gereksinim duyarlar.
- Step motorlarda çoğunlukla encoder olmaz ve açık çevrim çalıştırılırken, servo motorlar kapalı çevrim çalıştırılır.
- Step motorlar ile yapılan çözümler servo motorlara göre daha ucuzdur.
- Servo motor, step motorlara göre fazla hız gerektiren uygulamalarda tercih sebebidir.
- Profesyonel uygulamalar için servo motorlar tercih edilmektedir. Piyasada çeşitli özelliklerde servo motor bulmak ve destek almak daha kolaydır.
Step Motor Bakım
- Motorda bir arıza var ise bu arızanın mekanik mi yoksa elektrik arızası mı olduğu araştırılmalıdır.
- Arıza mekanik ise tamiri, parçalar yenileri ile değiştirilir.
- Elektrik arızalarında arızanın motor veya sürücü devresinde olup olmadığı kontrolünü yapılır.
- Motor elektrik arızalarında sargı uçları ve sargıları kontrol edilmelidir.
- Sürücü devresinde elektronik kartın kontrolünü yapılır.
- Toz, yağ ve diğer çevresel faktörlerden dolayı kirlenmeler oluşur. Bu kirlenmeler gerekli kimyasallar kullanarak giderilir.
Step Motor Çeşitleri
Yapılarına göre step motor çeşitleri;
- Sabit mıknatıslı step motor
- Hibrit (hybrid) senkron (eş zaman) step motor
- Değişken relüktanslı step motor
- Hidrolik step motor
- Lineer step motor
Step Motor Kullanım Alanları
Her türlü kontrol edilmiş hareket veya pozisyon gereken yerlerde step motorlar kullanılır. Dijital bilgileri mekanik harekete çeviren bir dönüştürücü (transduser) gibi görev yaparlar.
- Bant sürücüler, imalat tezgahları, yazıcı (printer), teyp sürücüleri, kart okuyucuları, kamera,
- Hafıza işlemlerinde, tıbbi cihazlarda, makine tezgahlarında, dikiş makineleri,
- Step motor sürücü kartı ile ayar ve kontrol tekniğinde, uzaktan kumanda göstergelerinde kullanılır.
Step Motor Fiyatları
Yapıları, step motor sürücü çeşitleri, kullanım alanları, step sürücü devre yapımı ve PLC devresi göz önünde bulundurulur. Bu motorlar mekanik sistemde doğrudan sabitlenemez.
Bunun için step motor tutucu denilen aparatlar kullanılmaktadır. Step motor fiyatlarını etkileyen faktörler arasında tutma torku, nema değeri, akım ve flanş ölçüsü gibi özellikler yer almaktadır. Fiyat aralığı oldukça geniştir.





Op-amp devleri nedir
Alçak gerilim hatlarında gerilim düşümü hesaplanması nedir
Açıklayabilirmisiniz
Lütfen
Op-amp ; “işlemsel Yükselteç” demektir. Toplama, çıkarma gibi basit aritmetik işlemlerden türev, integral, logaritma alma gibi ileri matematik işlemlerine, regülatörden, osilatöre ve karar devrelerine kadar çok geniş bir kullanım alanına sahip programlanabilir, analog bilgisayar işlemleri yapabilen devrelerdir.
Sitemizde “Gerilim Düşümü Hesabı” başlığı altında ulaşabilirsiniz.
step motora hareket edebilmesi için gereken sinyali programlamada nasıl verebiliriz? yardımcı olur musunuz
Programlama sisteminin nasıl yapılacağı konusunda bilgim yok.
servo motorlarla arasındaki fark nedir
“AC Servo Motor”, “DC Servo Motorlar” başlıklı yazımızda bu konular teferruatlı olarak anlatılmıştır. İncelemenizi tafsiye ederiz.
Kolay gelsin ben bir projem de step motor kullan mak istiyorum da bir tanesi 100 kg ma yakın güç uygulaması lazım digeri in de 250 kg ma yakın güç uygulama sı lazım nasıl bir step motor kullan mam lazım yardımcı olurmusunuz
Profesyonel bir uzmandan yardım almalısınız. Makinaları yerinde inceleyip sistemin gücüne göre hesap yapıp karara varılır. Buradan, incelemeden verilen bilgi sizi yanlışa götürür.
Evlerde neden reaktif güçten ceza yeme yoktur? (Meslek ödevim cevaplarsanız sevinirim)
Evlerde kurulu güç 7500 wat civarında olmaktadır. Bu güçler sürekli devrede değiller. Yalnız buzdolabı 400 wat gibi kabul etsek bile zaman zaman devre dışı kaldığı için kompanze bir devre kurulamıyor. Kar edelim derken zarar ederiz. Ancak site ve bloklarda bir haftalık bir ölçüm yapılır ve ortalaması alınır ve hesabı yapılarak kompanzasyon sistemi kurulabilir. “Kompanzasyon Nedir?”,”Kompanzasyon Hesabı”,”Kompanzasyon Kondansatör Hesabı Nasıl Yapılır?”,”Kompanzasyon Nasıl Yapılır?” başlıklı yazımızda daha detaylı bilgilere ulaşabilirsiniz.
Slm step motor ile saniyede bir turun 4/1 oranda dur kak yani 4 saniyede bir tur yapabilirmiyim duruş kalkış ile eksen tutma kaçma oranı nedir sağlam bir kontrol elde edebilirmiyim yoksa selvomu gerekli güç çok yok 80 mm x100mm alimiyyum tamburu çevirmesini istiyorum teknik destek verirseniz çok sevinirim teşekkürler
Adım motorlarının (step motoru) hangi tarafa doğru döneceği, devir sayısı, dönüş hızı gibi değerler mikroişlemci veya bilgisayar yardımıyla kontrol edilir. Tamburun tenik olarak hesaplanıp ona uygun bir motorun seçilmesi gerekir.